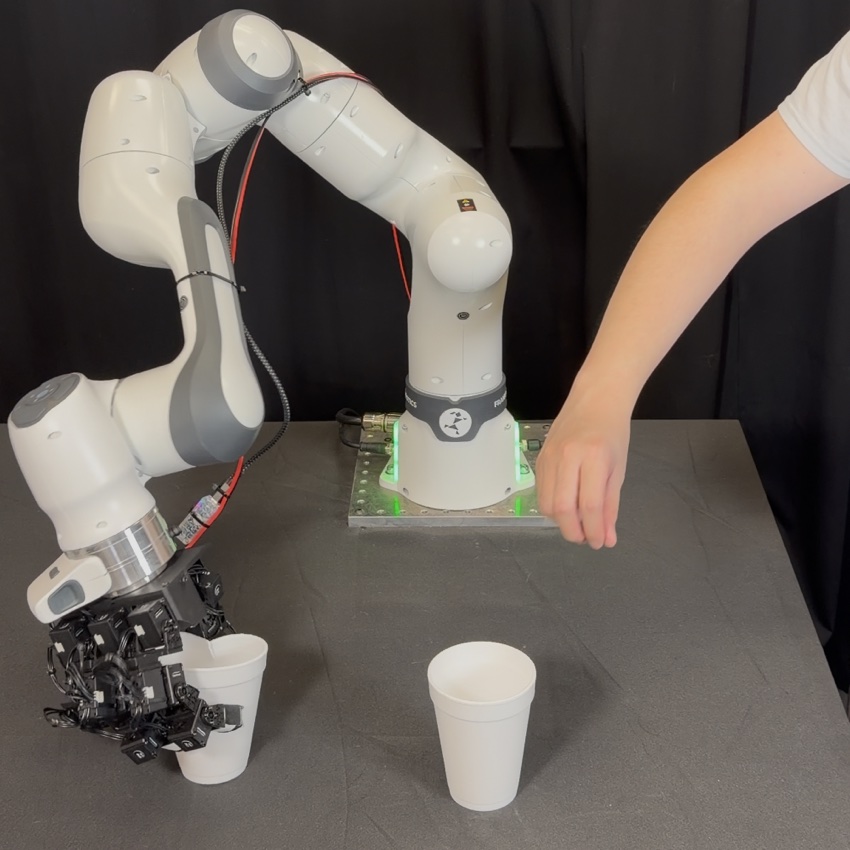
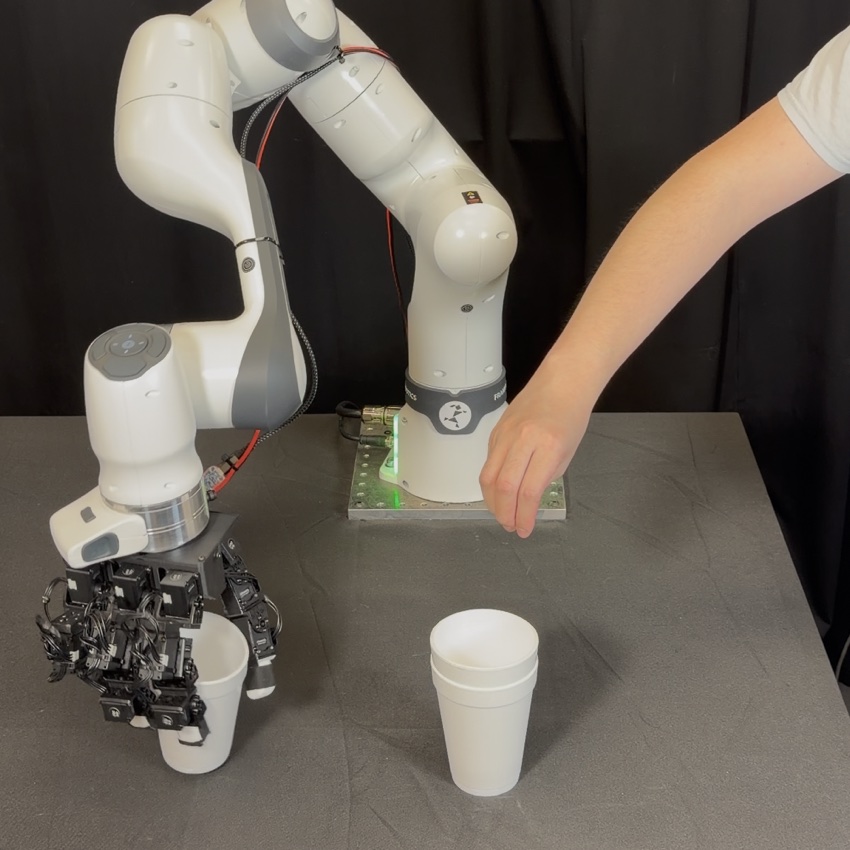
Foam-Cup Stacking
Teleoperated LEAP Hand + Franka stacks foam cups while avoiding deformation and grasp failure.
CoRL 2026 Submission
Proprioceptive Contact Feedback for Compliant Dexterous Manipulation
University of North Carolina at Chapel Hill
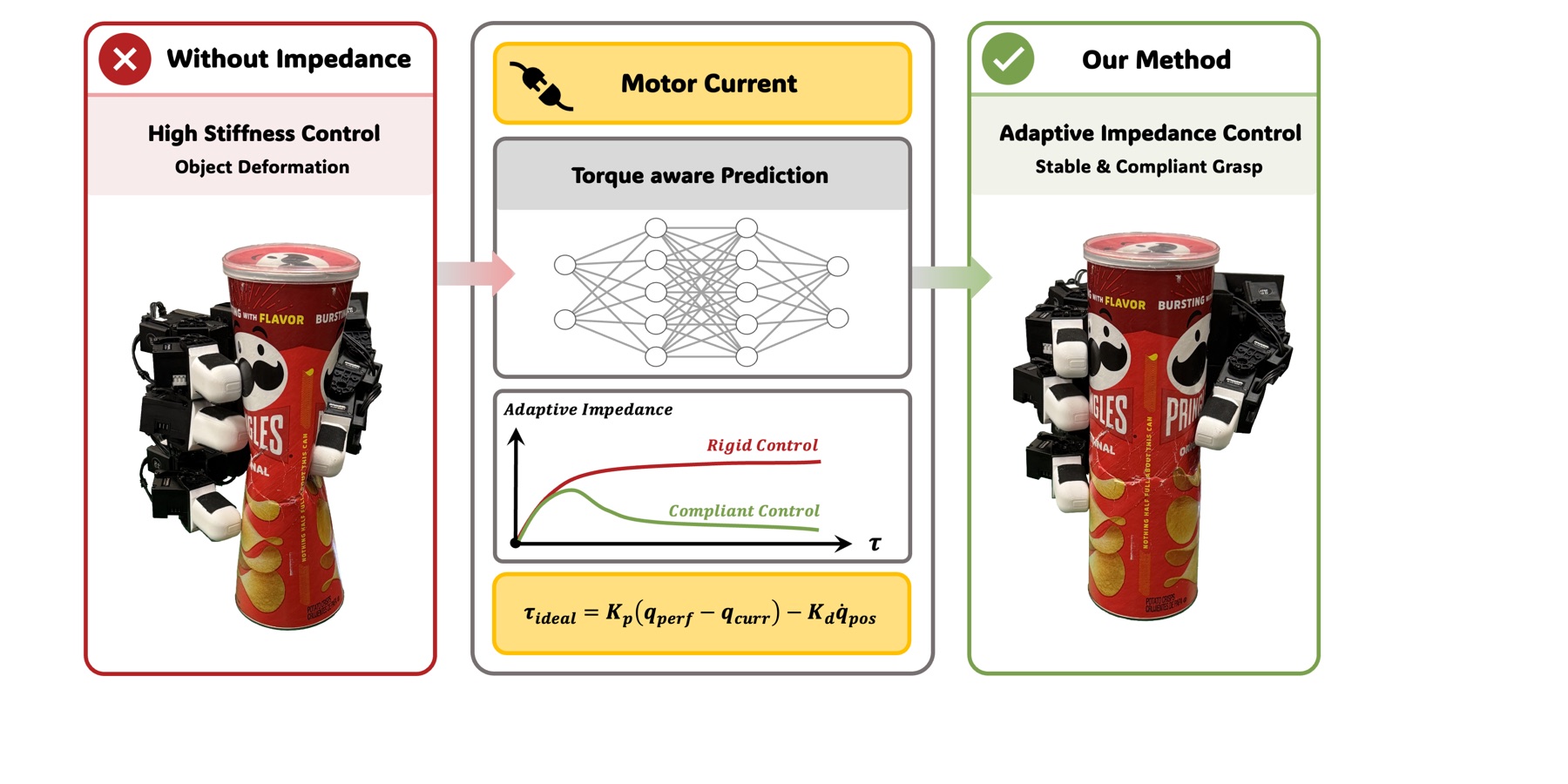
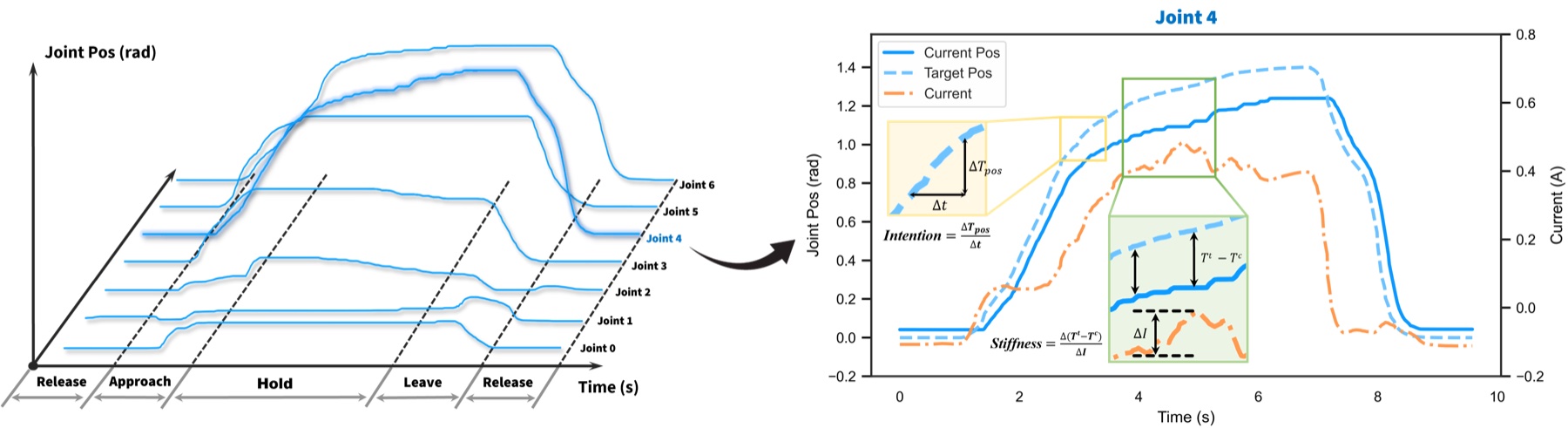
Compliance is essential for dexterous manipulation, yet tactile and force sensors can be costly, fragile, and difficult to integrate on low-cost robot hands. Current as Touch learns tactile-like contact feedback from motor current and joint states, then predicts a compliance reference position for a standard PD controller. The robot keeps the familiar position-control interface while adapting interaction forces from intrinsic proprioceptive feedback.
Motor current is closely related to actuator torque, so contact force, object resistance, and load changes leave traces in the hand's own proprioceptive stream. Instead of estimating external wrenches or commanding torque, the model predicts a contact-aware target position. The resulting PD position error produces compliant grasping force without external tactile sensors.
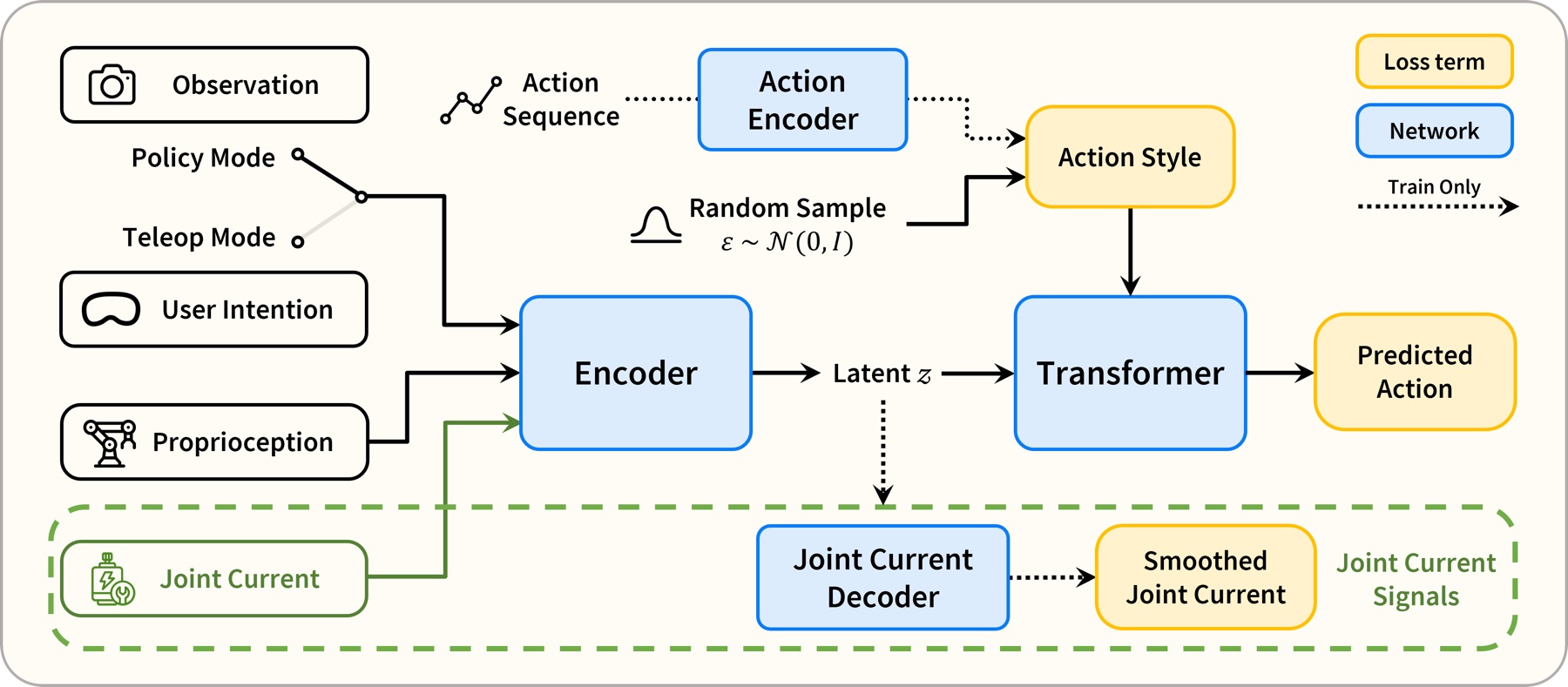
Uses raw motor current and joint states as tactile-like feedback.
Outputs compliance reference positions for standard low-level PD control.
Works in both human teleoperation and downstream policy learning.
Measurements on Unitree Dex3 and LEAP Hand show that motor current and joint states vary consistently with externally measured contact force. This motivates learning from current directly as a contact signal rather than adding fragile external tactile hardware.
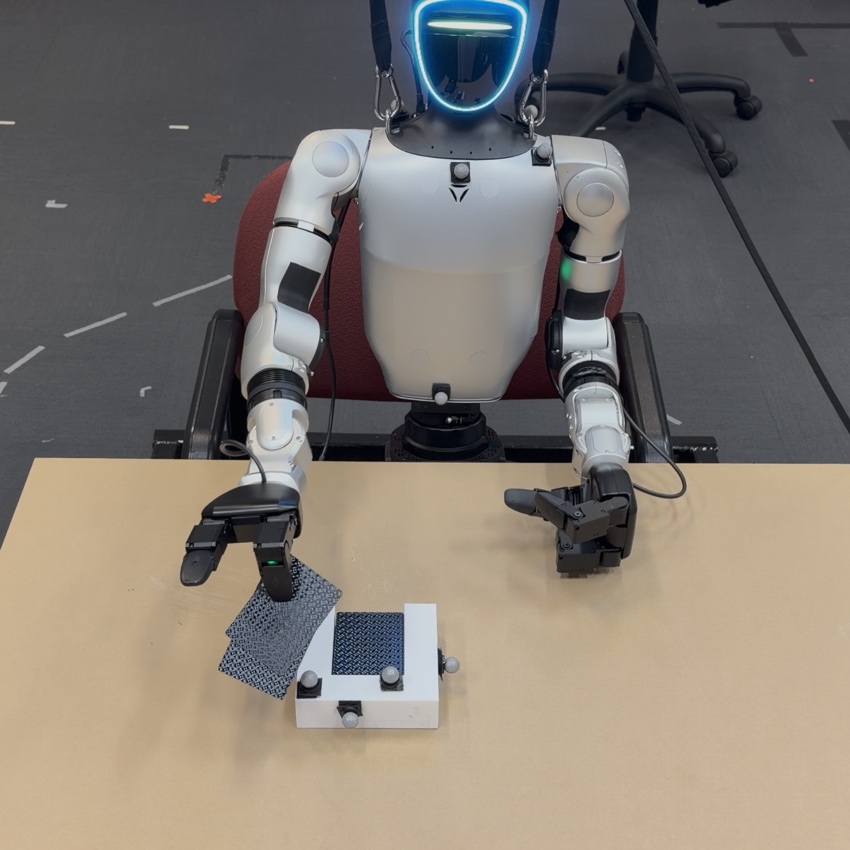
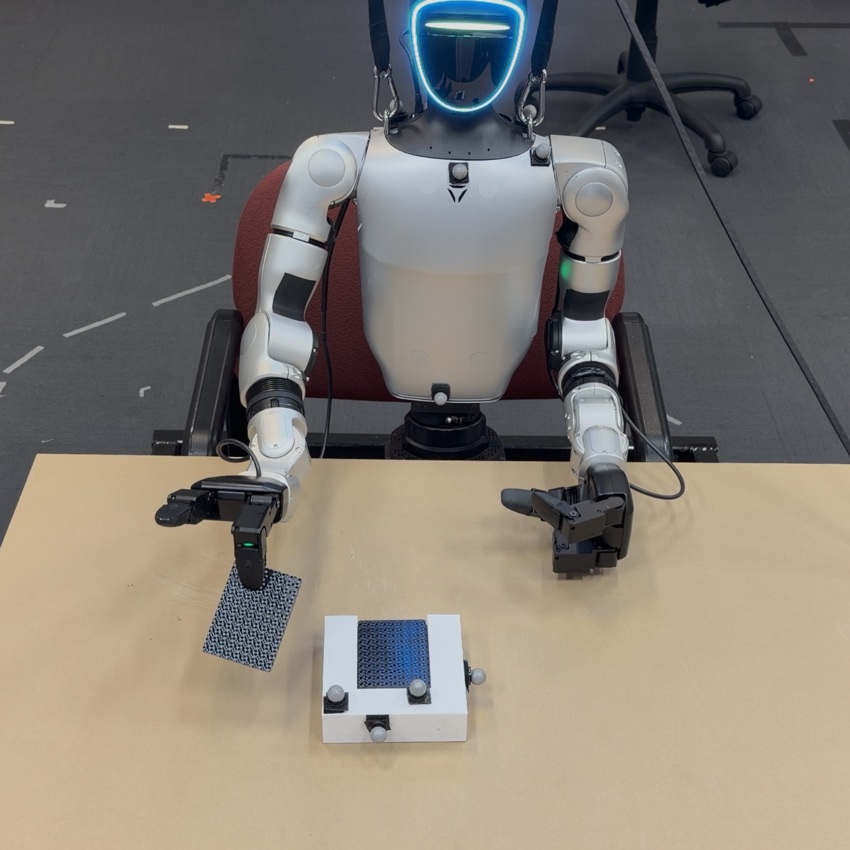
The same current-conditioned interface is evaluated on fragile object handling, dynamic load adaptation, sustained surface contact, and thin-object retrieval.
Teleoperated LEAP Hand + Franka stacks foam cups while avoiding deformation and grasp failure.

Dex3 on Unitree G1 maintains sustained contact while pressing an eraser against an inclined board.
Dex3 + G1 draws exactly one card from a deck, where excessive normal force pulls multiple cards.
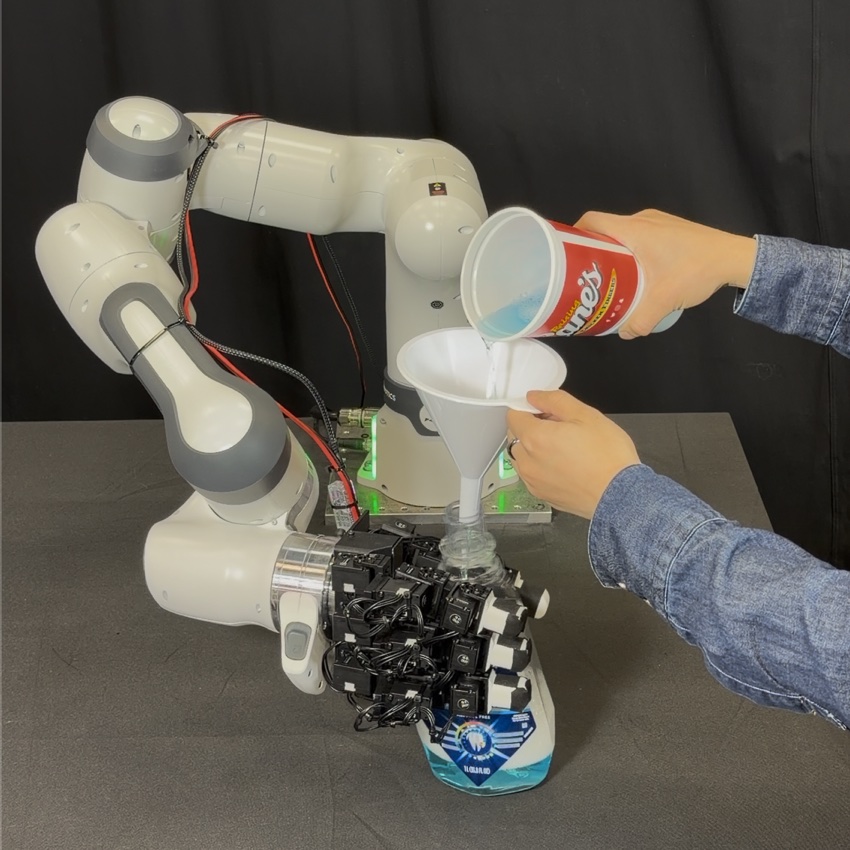
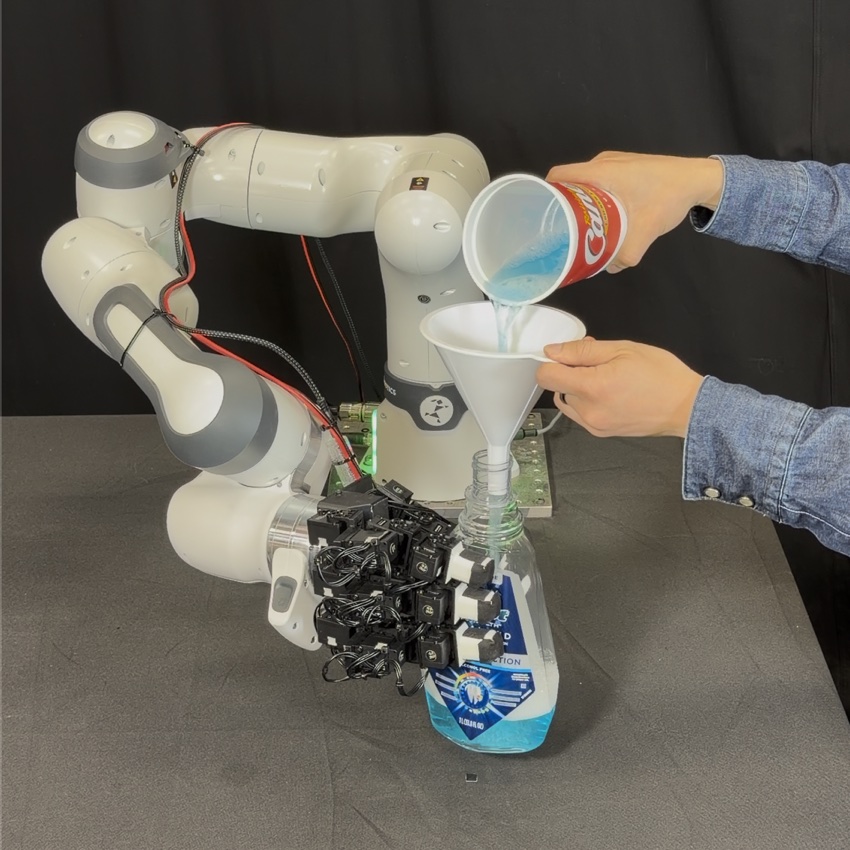
LEAP Hand + Franka holds a bottle as water is poured in, adapting grip as the load changes.
Foam-cup deformation for both novice and skilled users with current-conditioned CRP.
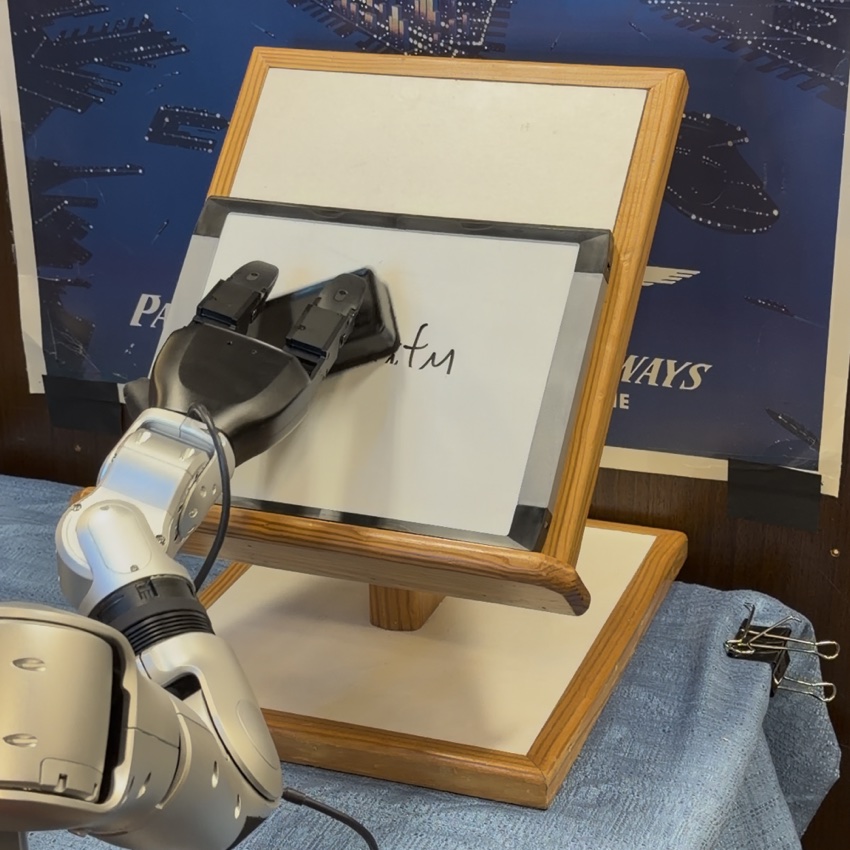
Whiteboard wiping success for both users, with shorter completion times.
Stable dynamic bottle holding at 250 g poured water, compared with 16.7% w/o current.
Strict single-card success, up from 55.8%; multi-card failures drop to 0.0%.
The video contains the task demonstrations and current/no-current comparisons included with the submission.
Place a compressed demo at assets/videos/current-as-touch-demo-web.mp4, or replace this source with a GitHub Release / CDN video URL.
@inproceedings{ma2026currentastouch,
title = {Current as Touch: Proprioceptive Contact Feedback for Compliant Dexterous Manipulation},
author = {Ma, Chenyang and Yao, Yunchao and Wei, Zhenyu and Li, Ruogu and Szafir, Daniel and Ding, Mingyu},
booktitle = {Conference on Robot Learning},
year = {2026}
}